
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

اسٹیپر موٹرز اور سرووس اور سروو موٹرز کے مابین فرق کو سمجھنے کے لئے ایک مضمون
I. اسٹیپر موٹرز اور سرووس اور سروو موٹرز کے مابین اختلافات
اسٹیپر موٹر: کیا اوپن لوپ کنٹرول عنصر اسٹیپر موٹر پارٹس کی کونیی نقل مکانی یا لائن نقل مکانی میں بجلی کا نبض سگنل ہے۔ سیدھے الفاظ میں ، یہ زاویہ اور موڑ کی تعداد کو کنٹرول کرنے کے لئے برقی نبض سگنل پر انحصار کرتا ہے۔ لہذا وہ صرف نبض کے سگنل پر انحصار کرتا ہے کہ کتنا گردش ہے۔ چونکہ کوئی سینسر نہیں ہے ، لہذا رکنے والا زاویہ انحراف کرسکتا ہے۔ تاہم ، قطعی نبض سگنل انحراف کو کم سے کم کرتا ہے۔
سروو موٹر: گردش کی پوزیشن کو کنٹرول کرنے کے لئے سینسر کے ذریعہ موٹر کی رفتار کو کنٹرول کرنے کے لئے سروو کنٹرول سرکٹ پر انحصار کریں۔ لہذا پوزیشن کنٹرول بہت عین مطابق ہے۔ اور گھماؤ کی رفتار بھی متغیر ہے۔
سروو (الیکٹرانک سروو): سروو کا بنیادی جزو سروو موٹر ہے۔ اس میں سروو موٹر کنٹرول سرکٹ + کمی گیئر سیٹ شامل ہے۔ اوہ ہاں ، سروو موٹر میں کمی گیئر سیٹ نہیں ہے۔ اور سرو میں کمی کا گیئر سیٹ ہے۔
کسی حد کی امداد کی صورت میں ، یہ آؤٹ پٹ شافٹ کے نیچے پوٹینومیٹر پر انحصار کرتا ہے تاکہ روڈر بازو کے اسٹیئرنگ زاویہ کا تعین کیا جاسکے۔ سروو سگنل کنٹرول پلس کی چوڑائی ماڈیولڈ (پی ڈبلیو ایم) سگنل ہے ، جہاں مائکروکونٹرولر آسانی سے اس سگنل کو تیار کرسکتا ہے۔
ii. اسٹیپر موٹر بنیادی اصول
یہ کیسے کام کرتا ہے:
عام طور پر موٹر کا روٹر ایک مستقل مقناطیس ہوتا ہے ، اور جب موجودہ اسٹیٹر ونڈینگ کے ذریعے بہتا ہے تو ، اسٹیٹر وینڈنگ ایک ویکٹر مقناطیسی فیلڈ تیار کرتی ہے۔ یہ مقناطیسی فیلڈ روٹر کو زاویہ سے گھومنے کے لئے چلائے گا ، تاکہ روٹر کے مقناطیسی کھیتوں کی جوڑی کی سمت اسٹیٹر کے مقناطیسی فیلڈ کی سمت کی طرح ہو۔ جب اسٹیٹر کا ویکٹر مقناطیسی فیلڈ کسی زاویہ سے گھومتا ہے۔ روٹر بھی اس مقناطیسی فیلڈ کے زاویہ سے گھومتا ہے۔ ہر ان پٹ برقی نبض کے ل the ، موٹر ایک کونیی قدم کو آگے گھومتی ہے۔ اس کا آؤٹ پٹ کونیی نقل مکانی ان پٹ دالوں کی تعداد کے متناسب ہے ، اور اس کی گردش کی رفتار دالوں کی تعدد کے متناسب ہے۔ اس ترتیب کو تبدیل کرکے جس میں سمیٹ کو متحرک کیا جاتا ہے ، موٹر الٹ جاتی ہے۔ لہذا ، دالوں کی تعداد اور تعدد اور موٹر کے ہر مرحلے کے سمیٹ کو تقویت بخشنے کے حکم کو اسٹپر موٹر کی گردش پر قابو پانے کے لئے کنٹرول کیا جاسکتا ہے۔
گرمی پیدا کرنے کا اصول:
عام طور پر ہر طرح کی موٹریں دیکھیں ، اندرونی آئرن کور اور سمیٹنے والی کنڈلی ہیں۔ سمیٹنے والی مزاحمت ، طاقت نقصان ، نقصان کا سائز اور مزاحمت پیدا کرے گی اور موجودہ مربع کے متناسب ہے ، جسے اکثر تانبے کے نقصان کے طور پر جانا جاتا ہے ، اگر موجودہ معیاری ڈی سی یا سائن لہر نہیں ہے تو ، ہارمونک نقصان بھی پیدا کرے گا۔ کور کا ہائسٹریسیس ایڈی موجودہ اثر ہے ، متبادل مقناطیسی فیلڈ میں بھی نقصان پیدا ہوگا ، مواد کا سائز ، موجودہ ، تعدد ، وولٹیج سے متعلق ، جسے لوہے کا نقصان کہا جاتا ہے۔ تانبے کے نقصان اور لوہے کا نقصان گرمی کی پیداوار کی شکل میں ظاہر ہوگا ، اس طرح موٹر کی کارکردگی کو متاثر کرتا ہے۔ قدم رکھنے والی موٹر عام طور پر پوزیشننگ کی درستگی اور ٹارک آؤٹ پٹ کا پیچھا کرتی ہے ، کارکردگی نسبتا low کم ہوتی ہے ، موجودہ عام طور پر بڑا ہوتا ہے ، اور ہارمونک اجزاء زیادہ ہوتے ہیں ، موجودہ رفتار اور تبدیلی کے ساتھ موجودہ ردوبدل کی تعدد ، لہذا قدم رکھنے والی موٹروں میں عام طور پر گرمی کی صورتحال ہوتی ہے ، اور صورتحال عام اے سی موٹر سے زیادہ سنگین ہوتی ہے۔
iii. روڈر کی تعمیر
سروو بنیادی طور پر رہائش ، سرکٹ بورڈ ، ڈرائیو موٹر ، گیئر ریڈوسر اور پوزیشن کا پتہ لگانے کا عنصر پر مشتمل ہے۔ اس کا کام کرنے والا اصول یہ ہے کہ وصول کنندہ سروو کو ایک سگنل بھیجتا ہے ، اور سرکٹ بورڈ پر آئی سی کوری لیس موٹر کو گھومنے پھرنے کے لئے چلاتا ہے ، اور بجلی کو کم کرنے والے گیئر کے ذریعے سوئنگ بازو میں منتقل کیا جاتا ہے ، اور اسی وقت ، پوزیشن کا پتہ لگانے والا اس بات کا تعین کرنے کے لئے ایک سگنل واپس بھیجتا ہے کہ آیا یہ پوزیشننگ پر پہنچا ہے یا نہیں۔ پوزیشن ڈیٹیکٹر دراصل ایک متغیر ریزسٹر ہے۔ جب سروو گھومتا ہے تو ، اس کے مطابق ریزٹر کی قیمت بدل جاتی ہے ، اور گردش کا زاویہ ریزٹر ویلیو کا پتہ لگانے سے معلوم کیا جاسکتا ہے۔ جنرل سروو موٹر ایک پتلی تانبے کے تار ہے جو تین قطب روٹر کے گرد لپیٹا ہوا ہے ، جب موجودہ کنڈلی سے بہاؤ مقناطیسی فیلڈ پیدا کرے گا ، اور روٹر مقناطیس کا دائرہ پیدا کرنے کے لئے ، جس کے نتیجے میں گردش کی طاقت پیدا ہوتی ہے۔ طبیعیات کے مطابق ، کسی شے کی جڑتا کا لمحہ اس کے بڑے پیمانے پر براہ راست متناسب ہوتا ہے ، لہذا اس چیز کے بڑے پیمانے پر گھومنے کے لئے زیادہ سے زیادہ ، طاقت کی ضرورت ہوتی ہے۔ تیز گردش کی رفتار اور کم بجلی کی کھپت کو حاصل کرنے کے ل the ، سروو پتلی تانبے کی تاروں سے بنا ہوا ہے جو ایک بہت ہی پتلی کھوکھلی سلنڈر میں مڑا ہوا ہے ، جس میں کوئی ہلکا پھلکا کھوکھلا روٹر بناتا ہے جس میں کوئی کھمبے نہیں ہوتے ہیں ، اور میگنےٹ سلنڈر کے اندر رکھے جاتے ہیں ، جو کھوکھلی کپ موٹر ہے۔
کام کرنے والے مختلف ماحول کے مطابق ، واٹر پروف اور ڈسٹ پروف ڈیزائن کے ساتھ سرووس موجود ہیں۔ اور مختلف بوجھ کی ضروریات کے جواب میں ، سرووس کے لئے پلاسٹک اور دھات کے گیئرز موجود ہیں ، اور سرووس کے لئے دھات کے گیئر عام طور پر اعلی ٹارک اور تیز رفتار ہوتے ہیں ، اس فائدہ کے ساتھ کہ زیادہ بوجھ کی وجہ سے گیئرز کو نہیں چھڑایا جائے گا۔ گردش کو تیز اور زیادہ درست بنانے کے ل higher اعلی گریڈ سرووس بال بیرنگ سے لیس ہوں گے۔ ایک بال بیئرنگ اور دو بال بیرنگ کے درمیان فرق ہے ، یقینا the دونوں بال بیرنگ بہتر ہیں۔ نئے ایف ای ٹی سرووس بنیادی طور پر ایف ای ٹی (فیلڈ اثر ٹرانجسٹر) کا استعمال کررہے ہیں ، جس میں کم داخلی مزاحمت کا فائدہ ہے اور اسی وجہ سے عام ٹرانجسٹروں سے کم موجودہ نقصان ہوتا ہے۔
iv. آپریشن کا سروو اصول
PWM لہر سے لے کر اندرونی سرکٹ میں تعصب وولٹیج پیدا کرنے کے لئے ، پوٹینومیٹر کو منتقل کرنے کے لئے کم کرنے والے گیئر کے ذریعے رابطہ کرنے والا جنریٹر ، تاکہ جب وولٹیج کا فرق صفر ہو تو ، موٹر رک جاتی ہے ، تاکہ سرو کے اثر کو حاصل کیا جاسکے۔
سروو پی ڈبلیو ایم کے پروٹوکول سب ایک جیسے ہیں ، لیکن ظاہر ہونے والے تازہ ترین سرووس مختلف ہوسکتے ہیں۔
پروٹوکول عام طور پر ہوتا ہے: مختلف زاویوں سے گزرنے کے لئے سروو کو کنٹرول کرنے کے لئے 0.5ms ~ 2.5ms میں اعلی سطح کی چوڑائی۔
V. امدادی موٹریں کیسے کام کرتی ہیں
نیچے دیئے گئے اعداد و شمار میں پاور آپریشنل یمپلیفائر LM675 کے ساتھ تیار کردہ سروو موٹر کنٹرول سرکٹ دکھاتا ہے ، اور موٹر ڈی سی سروو موٹر ہے۔ جیسا کہ اعداد و شمار سے دیکھا جاسکتا ہے ، پاور آپریشنل یمپلیفائر LM675 15V کے ذریعہ فراہم کیا جاتا ہے ، اور 15V وولٹیج کو RP 1 کے ذریعے آپریشنل یمپلیفائر LM675 کے ان فیز ان پٹ میں شامل کیا جاتا ہے ، اور LM675 کے آؤٹ پٹ وولٹیج کو سروو موٹر کے ان پٹ میں شامل کیا جاتا ہے۔ موٹر موٹر اسپیڈ کے اصل وقت کا پتہ لگانے کے لئے تیز رفتار پیمائش سگنل جنریٹر سے لیس ہے۔ در حقیقت ، اسپیڈ سگنل جنریٹر ایک قسم کا جنریٹر ہے ، اور اس کا آؤٹ پٹ وولٹیج گھماؤ رفتار کے متناسب ہے۔ اسپیڈ پیمائش سگنل جنریٹر جی سے وولٹیج آؤٹ پٹ کو وولٹیج ڈیوائڈر سرکٹ کے بعد اسپیڈ ایرر سگنل کے طور پر آپریشنل یمپلیفائر کے الٹ ان پٹ کو واپس کھلایا جاتا ہے۔ اسپیڈ کمانڈ پوٹینومیٹر آر پی 1 کے ذریعہ طے شدہ وولٹیج کی قیمت R1.R2 کے ذریعہ وولٹیج ڈویژن کے بعد آپریشنل یمپلیفائر کے ان فیز ان پٹ میں شامل کی جاتی ہے ، جو ریفرنس وولٹیج کے برابر ہے۔
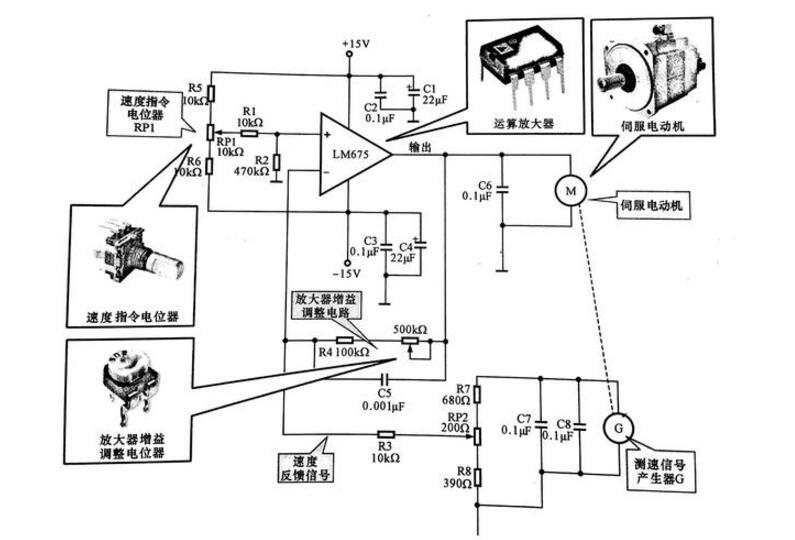
سروو موٹر کے اسکیمیٹک کو کنٹرول کریں
سرووموٹر: سرووموٹر کے لئے خط ایم کے ذریعہ اشارہ کیا گیا ہے ، یہ ڈرائیو سسٹم کے لئے طاقت کا ذریعہ ہے۔ آپریشنل یمپلیفائر: سرکٹ نام ، یعنی ، LM675 کے ذریعہ اشارہ کیا گیا ہے ، سروو کنٹرول سرکٹ میں ایک یمپلیفائر ٹکڑا ہے جو سروو موٹر کے لئے ڈرائیو کرنٹ فراہم کرتا ہے۔
اسپیڈ کمانڈ پوٹینومیٹر آر پی 1: سرکٹ میں آپریشنل یمپلیفائر کا حوالہ وولٹیج سیٹ کرتا ہے ، یعنی اسپیڈ سیٹنگ۔ یمپلیفائر حاصل ایڈجسٹمنٹ پوٹینومیٹر RP2: سرکٹ میں استعمال کیا جاتا ہے تاکہ بالترتیب یمپلیفائر گین اور اسپیڈ فیڈ بیک سگنل کے سائز کو بہتر بنایا جاسکے۔
جب موٹر کا بوجھ بدل جاتا ہے تو ، آپریشنل یمپلیفائر کے الٹی ان پٹ کو واپس کھلایا جاتا ہے ، یعنی ، جب موٹر کا بوجھ بڑھ جاتا ہے تو ، رفتار کم ہوجاتی ہے ، اور اسپیڈ سگنل جنریٹر کی آؤٹ پٹ وولٹیج میں بھی کمی آتی ہے ، تاکہ آپریشنل ایمپلیفائر کے الٹی ان پٹ میں وولٹیج میں اضافہ ہوتا ہے ، اور اس وولٹیج میں اضافہ اور حوالہ وولٹیج کے درمیان فرق ، اور ریفرنس وولٹیج کے درمیان فرق ، اور حوالہ وولٹیج کے درمیان فرق ، اور حوالہ وولٹیج کے درمیان فرق ، اور حوالہ وولٹیج کے درمیان فرق کم ہوجاتا ہے۔ اس کے برعکس ، جب بوجھ چھوٹا ہوجاتا ہے اور موٹر کی رفتار بڑھ جاتی ہے تو ، اسپیڈ ماپنے والے سگنل جنریٹر کا آؤٹ پٹ وولٹیج بڑھتا ہے ، آپریشنل یمپلیفائر کے الٹی ان پٹ میں شامل فیڈ بیک وولٹیج میں اضافہ ہوتا ہے ، اس وولٹیج اور ریفرنس وولٹیج کے درمیان فرق کم ہوجاتا ہے ، آپریشنل امپلیفائر کی آؤٹ پٹ وولٹیج میں کمی واقع ہوتی ہے ، اور موٹر اسپیڈ اس کے مطابق ہوسکتی ہے ، اور اس کے مطابق گھومنے والی رفتار میں کمی واقع ہوسکتی ہے ، اور موٹر اسپیڈ اس کے مطابق کم ہوجاتی ہے۔


